

L'exposition
Les robots des abysses
Prototype de bras articulé de robot sous-marin
Le robot sous-marin Victor 6000 possède deux bras, un bras de manipulation et un bras de préhension. Prénommés Maestro et Sherpa, ils sont commercialisés depuis une dizaine d’années par la société Cybernetix, et utilisent un brevet de l’Ifremer relatif aux vérins qui actionnent leurs différents segments. L’Ifremer a développé en 2010 un joystick innovant permettant de piloter les bras dans un espace quadrillé en trois dimensions (mode cartésien) ou avec des repères angulaires (système polaire).
Le bras télémanipulateur principal est de type « maître-esclave », c’est-à-dire qu’il reproduit au fond les mouvements commandés par le « maître » depuis le poste de contrôle. Ce principe permet d’avoir une grande dextérité, difficile à obtenir sans homme et sans vision 3D au fond. Grâce aux mouvements programmés à l’avance pour sortir les outils et les stocker, le bras permet de gagner du temps et d’améliorer la sécurité.
![]()
-
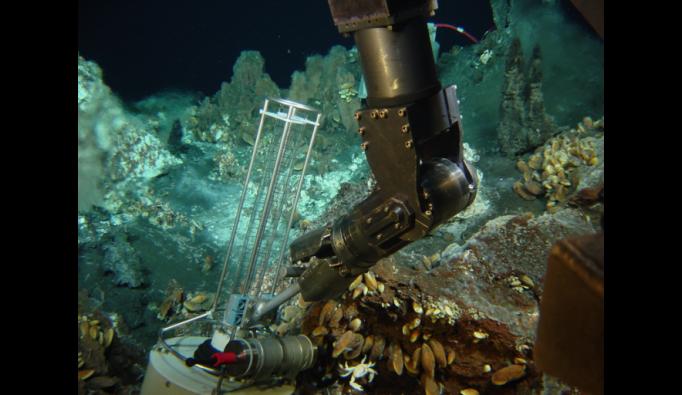
Prototype de bras articulé de robot sous-marin Ifremer- La Seyne-sur-Mer (Var)
© DT INSU - CNRS / Laurent Beguery
Planeur sous-marin Slocum, Teledyne Webb Research, 2008
Le planeur (glider) est une plate-forme très complémentaire des systèmes d’observation existants, en particulier pour la surveillance de certaines régions de l’océan. Il a été inventé dans les années 1980 par l’océanographe américain Henry Stommel et sa mise au point s’est avérée délicate pour le rendre suffisamment fiable et autonome. Ce robot se déplace en « planant » vers un point prédéfini, entre la surface et 1 000 mètres de profondeur. En remplissant ou vidant un ballast placé à l’avant, le glider peut « couler » ou « flotter » en parcourant la colonne d’eau. En s’appuyant sur l’eau pour planer, il avance d’environ 25 kilomètres par jour.
Grâce à ce mode de propulsion original, il peut rester plusieurs mois en mer, parcourant ainsi plusieurs milliers de kilomètres, seulement relié à son opérateur par satellite lorsqu’il remonte en surface (toutes les quatre heures). Le glider enregistre les paramètres physiques et biologiques de l’eau pendant son cycle de montée/descente.
-

Planeur sous-marin Slocum- Teledyne Webb Research- 2008 DT-Insu/CNRS- La Seyne-sur-Mer (Var)
© DT INSU - CNRS / Laurent Beguery
Retransmission en direct d’un glider en mer
L’Institut national des sciences de l’univers du CNRS assure la surveillance de l’atmosphère et de l’eau de la Méditerranée dans le cadre des programmes Moose et Mistrals. Pendant dix ans, de nombreuses missions océanographiques vont permettre de caractériser la nature physique et biologique de cette mer ainsi que sa variabilité. Les paramètres mesurés lors de ces missions sont la température et la conductivité de l’eau de mer, ce qui permet d’en déduire la salinité, le taux d’oxygène dissous, la teneur en chlorophylle A et en matières organiques dissoutes ainsi que la clarté. Cette carte en temps réel montre les positions des planeurs sous-marins déployés dans le cadre de ces programmes.
Simulateur de robotique pour l’exploration sous-marine
Ce dispositif pédagogique, réalisé par la société Prolexia basée à La Seyne-sur-Mer, simule le comportement d’un sous-marin. Le submersible utilisé est un modèle hydrodynamique prenant en compte les efforts de propulsion, les efforts hydrodynamiques (traînée, courants), les gouvernes, les contacts (collisions avec le relief ou avec d’autres véhicules), la répartition des masses, la consommation d’énergie...
Le joystick permet de piloter le véhicule et d’agir sur les consignes de cap, de vitesse, d’immersion ou de profondeur. Le tableau de bord rassemble les informations nécessaires au pilotage : immersion, profondeur, vitesse, cap, roulis, tangage, vitesse de rotation des propulseurs, orientation des gouvernes, énergie, alarmes (profondeur, énergie...). Ce simulateur a pour objectif de présenter de manière ludique les activités essentielles en matière de robotique sous-marine à l’Ifremer.
-
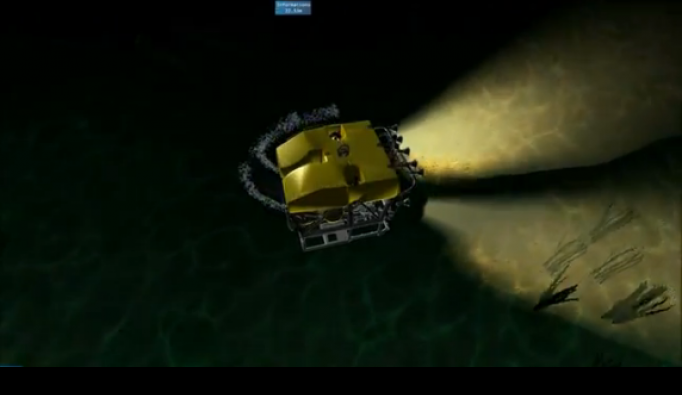
Capture d'écran du simulateur développé par Ifremer
© Ifremer, La Seynes-sur-Mer (Var)
Jack, robot compact téléopéré d’observation et d’inspection sous-marine, 2010
Jack est un robot conçu pour l’observation et l’inspection sous-marine, capable de descendre jusqu’à 100 mètres. Compact, modulaire et manoeuvrant à poussée dite « vectorielle », c’est-à-dire capable de se déplacer dans la direction souhaitée dans le plan horizontal comme le font les hélicoptères, il est adapté à des missions de différentes natures : sécurité portuaire et civile, inspection en mer, dans des barrages, des lacs ou dans le cadre de missions de spéléologie sous-marine ou de recherche.
Le robot et sa console de pilotage auto-alimentés permettent une mise en oeuvre dans des lieux difficilement accessibles. Son architecture personnalisable lui permet d’être aisément équipé de capteurs, selon la configuration de mission souhaitée.
-

Jack- robot compact téléopéré d’observation et d’inspection sous-marine- 2010 CISCREA- Toulon (Var)
© CISCREA